Classify Query Data
This example shows how to classify query data by:
-
Growing a Kd-tree
-
Conducting a k nearest neighbor search using the grown tree.
-
Assigning each query point the class with the highest representation among their respective nearest neighbors.
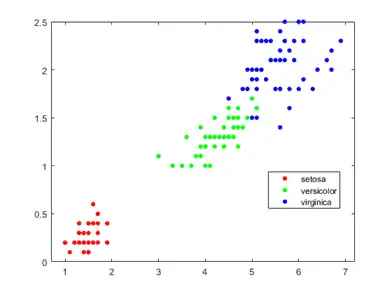
Classify a new point based on the last two columns of the Fisher iris data. Using only the last two columns makes it easier to plot.
load fisheriris
x = meas(:,3:4);
gscatter(x(:,1),x(:,2),species)
legend('Location','best')
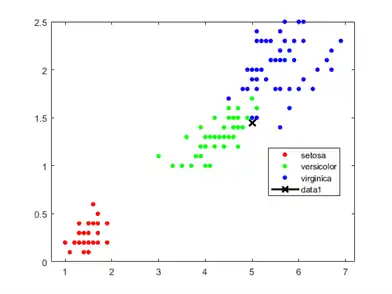
Plot the new point.
newpoint = [5 1.45]; line(newpoint(1),newpoint(2),'marker','x','color','k',... 'markersize',10,'linewidth',2)
Prepare a Kd-tree neighbor searcher model.
Mdl = KDTreeSearcher(x)
Mdl =
KDTreeSearcher with properties:
BucketSize: 50
Distance: 'euclidean'
DistParameter: []
X: [150x2 double]
Mdl is a KDTreeSearcher model. By default, the distance metric it uses to search for neighbors is Euclidean distance.
Find the 10 sample points closest to the new point.
[n,d] = knnsearch(Mdl,newpoint,'k',10);
line(x(n,1),x(n,2),'color',[.5 .5 .5],'marker','o',...
'linestyle','none','markersize',10)
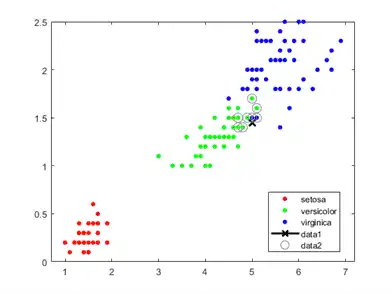
It appears that knnsearch has found only the nearest eight neighbors. In fact, this particular dataset contains duplicate values.
x(n,:)
ans = 10×2
5.0000 1.5000
4.9000 1.5000
4.9000 1.5000
5.1000 1.5000
5.1000 1.6000
4.8000 1.4000
5.0000 1.7000
4.7000 1.4000
4.7000 1.4000
4.7000 1.5000
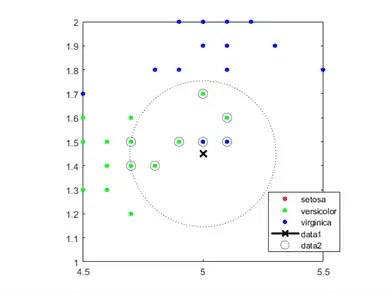
Make the axes equal so the calculated distances correspond to the apparent distances on the plot axis equal and zoom in to see the neighbors better.
xlim([4.5 5.5]); ylim([1 2]); axis square

Find the species of the 10 neighbors.
tabulate(species(n))
Value Count Percent virginica 2 20.00% versicolor 8 80.00%
Using a rule based on the majority vote of the 10 nearest neighbors, you can classify this new point as a versicolor.
Visually identify the neighbors by drawing a circle around the group of them. Define the center and diameter of a circle, based on the location of the new point.
ctr = newpoint - d(end);
diameter = 2*d(end);
% Draw a circle around the 10 nearest neighbors.
h = rectangle('position',[ctr,diameter,diameter],...
'curvature',[1 1]);
h.LineStyle = ':';
Using the same dataset, find the 10 nearest neighbors to three new points.
figure
newpoint2 = [5 1.45;6 2;2.75 .75];
gscatter(x(:,1),x(:,2),species)
legend('location','best')
[n2,d2] = knnsearch(Mdl,newpoint2,'k',10);
line(x(n2,1),x(n2,2),'color',[.5 .5 .5],'marker','o',...
'linestyle','none','markersize',10)
line(newpoint2(:,1),newpoint2(:,2),'marker','x','color','k',...
'markersize',10,'linewidth',2,'linestyle','none')
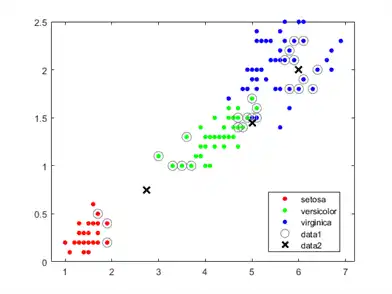
Find the species of the 10 nearest neighbors for each new point.
tabulate(species(n2(1,:)))
Value Count Percent virginica 2 20.00% versicolor 8 80.00%
tabulate(species(n2(2,:)))
Value Count Percent virginica 10 100.00%
tabulate(species(n2(3,:)))
Value Count Percent
versicolor 7 70.00%
setosa 3 30.00%
For more examples using knnsearch methods and function, see the individual reference pages.