You can estimate the transfer function of an unknown system based on the system's measured input and output data.
In DSP System Toolbox™, you can estimate the transfer function of a system using the dsp.TransferFunctionEstimator System object™ in MATLAB® and the Discrete Transfer Function Estimator block in Simulink®. The relationship between the input x and output y is modeled by the linear, time-invariant transfer function Txy. The transfer function is the ratio of the cross power spectral density of x and y, Pyx, to the power spectral density of x, Pxx:
Txy(f)=Pyx(f)Pxx(f)
The dsp.TransferFunctionEstimator object and Discrete Transfer Function Estimator block use the Welch’s averaged periodogram method to compute the Pxx and Pxy. For more details on this method, see Spectral Analysis.
Coherence
The coherence, or magnitude-squared coherence, between x and y is defined as:
Cxy(f)=?Pxy?2Pxx∗Pyy
The coherence function estimates the extent to which you can predict y from x. The value of the coherence is in the range 0 ≤ Cxy(f) ≤ 1. If Cxy = 0, the input x and output y are unrelated. A Cxy value greater than 0 and less than 1 indicates one of the following:
-
Measurements are noisy.
-
The system is nonlinear.
-
Output y is a function of x and other inputs.
The coherence of a linear system represents the fractional part of the output signal power that is produced by the input at that frequency. For a particular frequency, 1 – Cxy is an estimate of the fractional power of the output that the input does not contribute to.
When you set the OutputCoherence property of dsp.TransferFunctionEstimator to true, the object computes the output coherence. In the Discrete Transfer Function Estimator block, to compute the coherence spectrum, select the Output magnitude squared coherence estimate check box.
Estimate the Transfer Function in MATLAB
To estimate the transfer function of a system in MATLAB™, use the dsp.TransferFunctionEstimator System object™. The object implements the Welch's average modified periodogram method and uses the measured input and output data for estimation.
Initialize the System
The system is a cascade of two filter stages: dsp.LowpassFilter and a parallel connection of dsp.AllpassFilter and dsp.AllpoleFilter.
allpole = dsp.AllpoleFilter; allpass = dsp.AllpassFilter; lpfilter = dsp.LowpassFilter;
Specify Signal Source
The input to the system is a sine wave with a frequency of 100 Hz. The sampling frequency is 44.1 kHz.
sine = dsp.SineWave('Frequency',100,'SampleRate',44100,...
'SamplesPerFrame',1024);
Create Transfer Function Estimator
To estimate the transfer function of the system, create the dsp.TransferFunctionEstimator System object.
tfe = dsp.TransferFunctionEstimator('FrequencyRange','onesided',...
'OutputCoherence', true);
Create Array Plot
Initialize two dsp.ArrayPlot objects: one to display the magnitude response of the system and the other to display the coherence estimate between the input and the output.
tfeplotter = dsp.ArrayPlot('PlotType','Line',...
'XLabel','Frequency (Hz)',...
'YLabel','Magnitude Response (dB)',...
'YLimits',[-120 20],...
'XOffset',0,...
'XLabel','Frequency (Hz)',...
'Title','System Transfer Function',...
'SampleIncrement',44100/1024);
coherenceplotter = dsp.ArrayPlot('PlotType','Line',...
'YLimits',[0 1.2],...
'YLabel','Coherence',...
'XOffset',0,...
'XLabel','Frequency (Hz)',...
'Title','Coherence Estimate',...
'SampleIncrement',44100/1024);
By default, the x-axis of the array plot is in samples. To convert this axis into frequency, set the 'SampleIncrement' property of the dsp.ArrayPlot object to Fs/1024. In this example, this value is 44100/1024, or 43.0664. For a two-sided spectrum, the XOffset property of the dsp.ArrayPlot object must be [-Fs/2]. The frequency varies in the range [-Fs/2 Fs/2]. In this example, the array plot shows a one-sided spectrum. Hence, set the XOffset to 0. The frequency varies in the range [0 Fs/2].
Estimate the Transfer Function
The transfer function estimator accepts two signals: input to the two-stage filter and output of the two-stage filter. The input to the filter is a sine wave containing additive white Gaussian noise. The noise has a mean of zero and a standard deviation of 0.1. The estimator estimates the transfer function of the two-stage filter. The output of the estimator is the frequency response of the filter, which is complex. To extract the magnitude portion of this complex estimate, use the abs function. To convert the result into dB, apply a conversion factor of 20*log10(magnitude).
for Iter = 1:1000
input = sine() + .1*randn(1024,1);
lpfout = lpfilter(input);
allpoleout = allpole(lpfout);
allpassout = allpass(lpfout);
output = allpoleout + allpassout;
[tfeoutput,outputcoh] = tfe(input,output);
tfeplotter(20*log10(abs(tfeoutput)));
coherenceplotter(outputcoh);
end
![]()
![]()
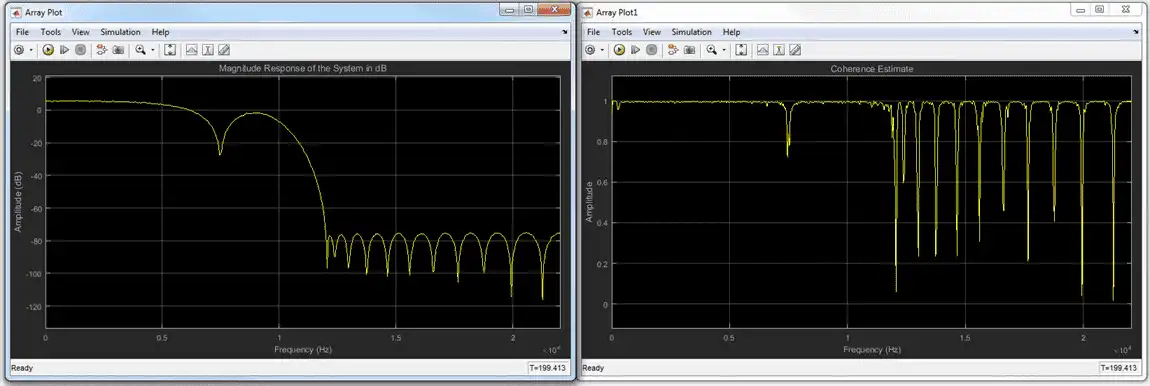
The first plot shows the magnitude response of the system. The second plot shows the coherence estimate between the input and output of the system. Coherence in the plot varies in the range [0 1] as expected.
Magnitude Response of the Filter Using fvtool
The filter is a cascade of two filter stages - dsp.LowpassFilter and a parallel connection of dsp.AllpassFilter and dsp.AllpoleFilter. All the filter objects are used in their default state. Using the filter coefficients, derive the system transfer function and plot the frequency response using freqz. Below are the coefficients in the [Num] [Den] format:
-
All pole filter - [1 0] [1 0.1]
-
All pass filter - [0.5 -1/sqrt(2) 1] [1 -1/sqrt(2) 0.5]
-
Lowpass filter - Determine the coefficients using the following commands:
lpf = dsp.LowpassFilter; Coefficients = coeffs(lpf);
Coefficients.Numerator gives the coefficients in an array format. The mathematical derivation of the overall system transfer function is not shown here. Once you derive the transfer function, run fvtool and you can see the frequency response below:

The magnitude response that fvtool shows matches the magnitude response that the dsp.TransferFunctionEstimator object estimates.
Estimate the Transfer Function in Simulink
To estimate the transfer function of a system in Simulink, use the Discrete Transfer Function Estimator block. The block implements the Welch's average modified periodogram method and uses the measured input and output data for estimation.
The system is a cascade of two filter stages: a lowpass filter and a parallel connection of an allpole filter and allpass filter. The input to the system is a sine wave containing additive white Gaussian noise. The noise has a mean of zero and a standard deviation of 0.1. The input to the estimator is the system input and the system output. The output of the estimator is the frequency response of the system, which is complex. To extract the magnitude portion of this complex estimate, use the Abs block. To convert the result into dB, the system uses a dB (1 ohm) block.

Open and Inspect the Model
To open the model, enter ex_transfer_function_estimator in the MATLAB command prompt.
Here are the settings of the blocks in the model.
| Block | Parameter Changes | Purpose of the block |
|---|---|---|
| Sine Wave |
|
Sinusoid signal with frequency at 100 Hz |
| Random Source |
|
Random Source block generates a random noise signal with properties specified through the block dialog box |
| Lowpass Filter | No change | Lowpass filter |
| Allpole Filter | No change | Allpole filter with coefficients [1 0.1] |
| Discrete Filter |
|
Allpass filter with coefficients [-1/sqrt(2) 0.5] |
| Discrete Transfer Function Estimator |
|
Transfer function estimator |
| Abs | No change | Extracts the magnitude information from the output of the transfer function estimator |
| First Array Plot block |
Click View:
|
Shows the magnitude response of the system |
| Second Array Plot block |
Click View:
|
Shows the coherence estimate |
By default, the x-axis of the array plot is in samples. To convert this axis into frequency, the Sample increment parameter is set to Fs/1024. In this example, this value is 44100/1024, or 43.0664. For a two-sided spectrum, the X-offset parameter must be –Fs/2. The frequency varies in the range [-Fs/2 Fs/2]. In this example, the array plot shows a one-sided spectrum. Hence, the X-offset is set to 0. The frequency varies in the range [0 Fs/2].
Run the Model
The first plot shows the magnitude response of the system. The second plot shows the coherence estimate between the input and output of the system. Coherence in the plot varies in the range [0 1] as expected.